Mingyu Kim
k012123600@gmail.com
20-02-2001

Welcome
Thank you for visiting my profile page.
I am a M.S. candidate in Applied Artificial Intelligence at Myongji University (MJU), advised by Prof. Jaehee Jung .
My master's research focused on enhancing dynamic obstacle avoidance performance in mobile robot navigation by leveraging deep learning models to process semantic information and generate human-like trajectories based on imitation learning.
In the future, my primary research interests will focus on
Reinforcement Learning for Robotic Manipulation
Vision-Language-Action model
Multimodal learning
News
- [Oct 2025] Started research on graph-based pedestrian trajectory prediction.
- [Oct 2025] The first open-source robot project under Gradus, DiffDriveRobot, has been released.
- [Oct 2025] Launched the open-source robotics project Gradus.
- [Sep 2025] One paper on imitation-learning-based dynamic obstacle avoidance was accepted for publication in IEEE Access.
- [Sep 2025] One paper on hierarchical misbehavior classification for V2X communication systems was accepted for publication in IEEE Access.
- [Mar 2025] Submitted a paper to IROS 2025. (Rejected in Jun 2025)
- [Oct 2024] Submitted a paper to IEEE RA-L. (Rejected in Dec 2024)
- [Apr 2024] I have been selected as the principal investigator for a research project funded by the National Research Foundation's "석사과정생연구장려금지원사업" (₩12,000,000).
Research
(* denotes equal contribution)
1. HADP: Hybrid A*-Diffusion Planner for Robust Navigation in Dynamic Obstacle Environments
[Paper]
IEEE Access (2026.9) Impact Factor: 3.6
We proposed the Hybrid A*-Diffusion Planner (HADP) to overcome the generalization and data-efficiency limitations of pure diffusion-based planning in dynamic environments. Our approach uses A* for global path planning in obstacle-free regions and a conditional diffusion model fed by a semantic map, robot pose, and local goal to generate responsive local avoidance trajectories upon detecting dynamic obstacles.
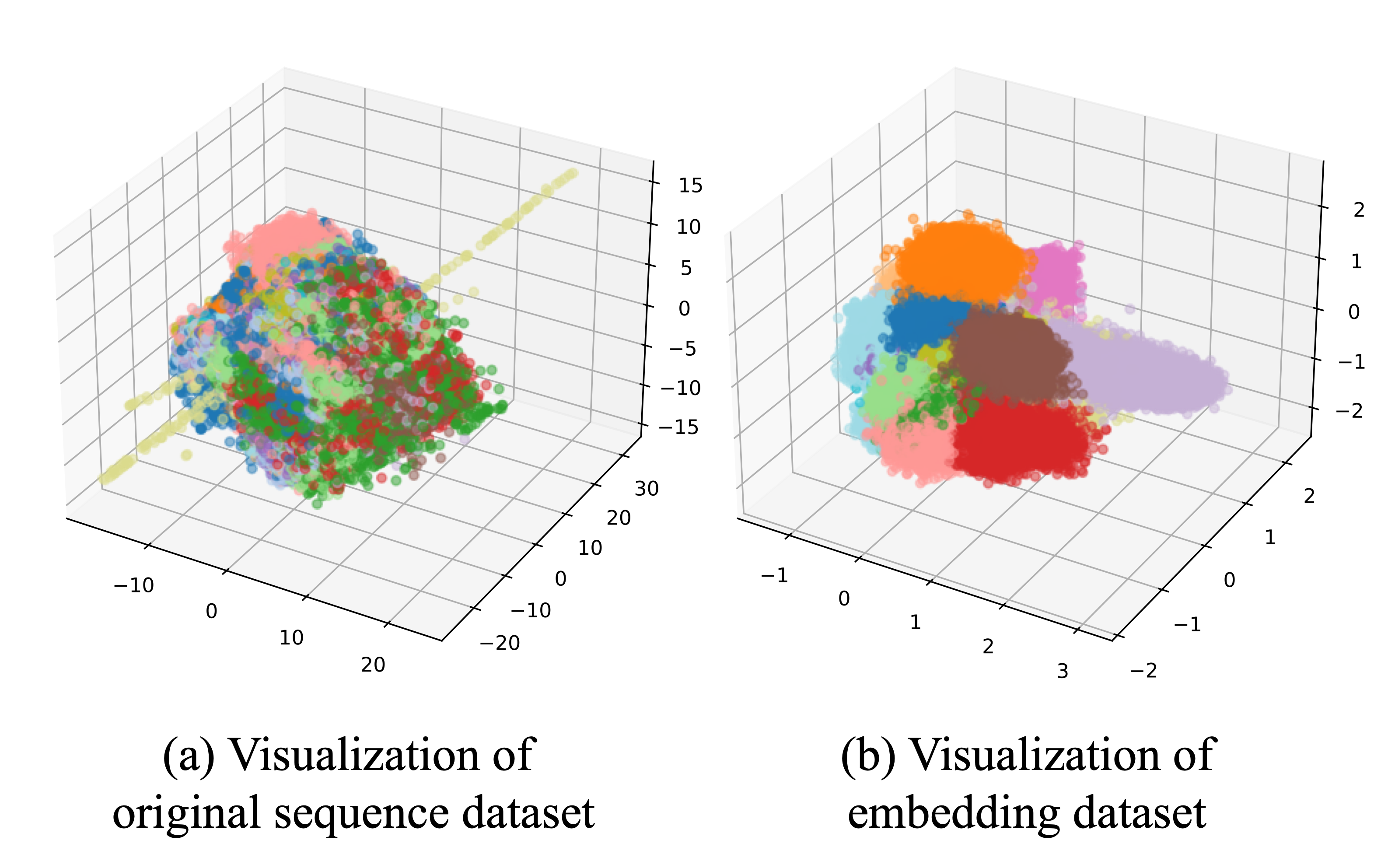
2. HiMSELF: A Hierarchical Misbehavior Classification with Sequence Embedding by Latent Features in Vehicular Ad-Hoc Networks
[Paper]
IEEE Access (2026.8) Impact Factor: 3.6
We propose HiMSELF, a misbehavior classification system that learns latent sequence embeddings of multi-class BSM data, applies hierarchical clustering to construct a two-stage classification hierarchy, and achieves an average F1-score of 0.9918 on 19 misbehavior classes, outperforming existing models.
Robot Development and Implementation
All of these projects were conducted solely by myself.
These robots are now being unified and released as part of an open-source robotics platform called Project Gradus.



Technical Skills
- Python
- C
- Java Script
- Pytorch
- Tensorflow
- NestJS
- ROS
- Gazebo
- Fusion 360