Mingyu Kim
k012123600@gmail.com
20-02-2001

Omni-Wheel-Based Robot
An omni-wheel is a specialized wheel with multiple small rollers mounted around its circumference at regular intervals.
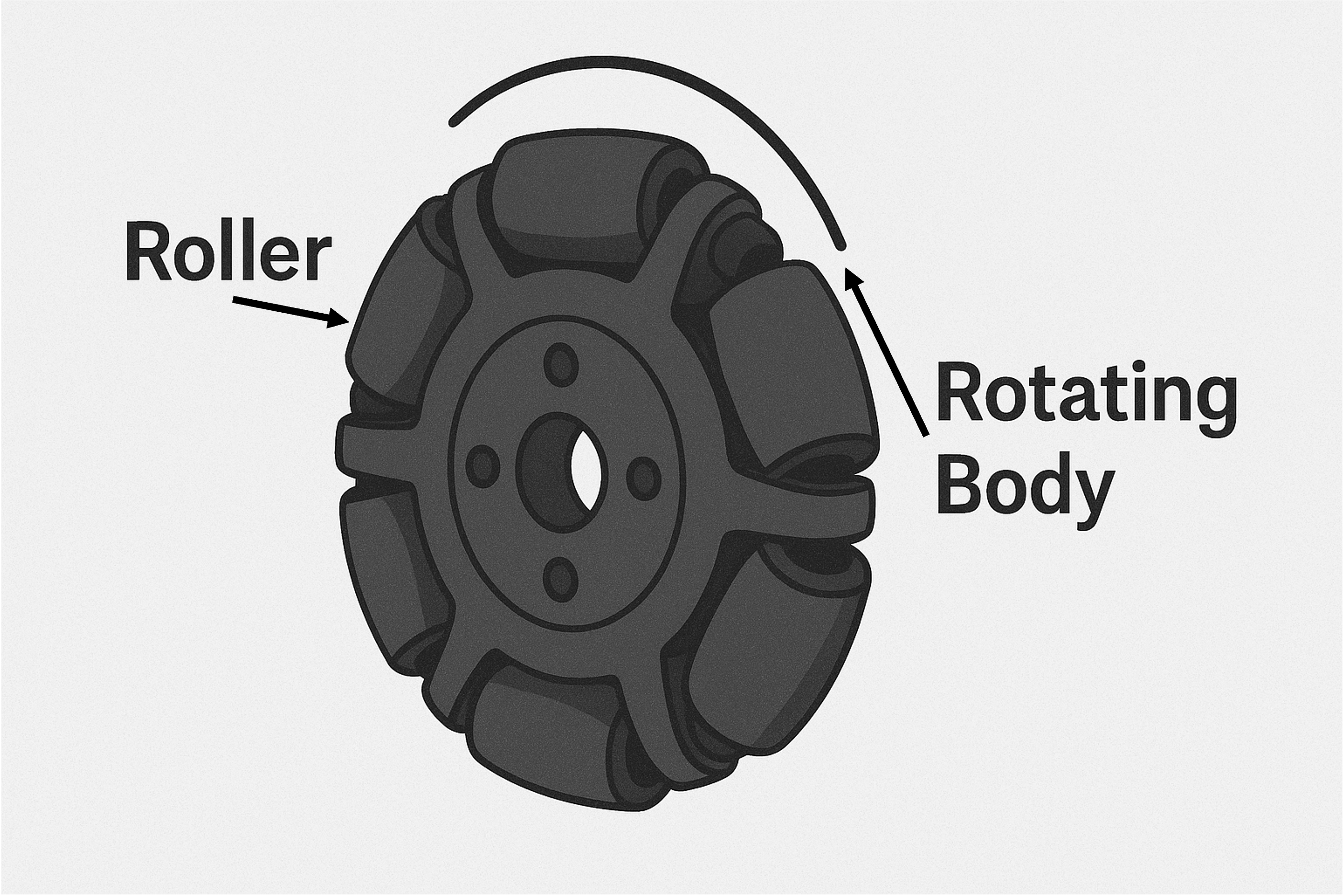
Each roller is angled relative to the wheel’s axis of rotation, enabling smooth lateral movement. Thanks to this unique structure, a robot can move freely in any direction—360 degrees—without changing its orientation. This enables excellent maneuverability and precise positioning, even in tight spaces.
\[ \begin{pmatrix} u_1\\[6pt] u_2\\[6pt] u_3 \end{pmatrix} = \frac{1}{r} \begin{pmatrix} -d & 1 & 0 \\[4pt] -d & -\tfrac12 & -\sin\!\bigl(\tfrac{\pi}{3}\bigr) \\[4pt] -d & -\tfrac12 & +\sin\!\bigl(\tfrac{\pi}{3}\bigr) \end{pmatrix} \begin{pmatrix} \omega_{bz}\\[4pt] v_{bx}\\[4pt] v_{by} \end{pmatrix} \]
r: Wheel radius
d: Distance from the robot’s center to each wheel
Wheel mounting angles: \( \beta_1 = 0,\;\beta_2 = -\frac{2\pi}{3},\;\beta_3 = +\frac{2\pi}{3} \)
ui: Rotational speed assigned to each wheel
The value of \(u_i\) obtained from the equation is normalized using a scaling factor and converted into a PWM signal, with the sign determining the rotation direction of each motor.
This omni-wheel robot was the first complete robotic system through which I directly experienced every stage from design and fabrication to communication, firmware development, simulation, and real-world testing. By handling everything from hardware configuration and sensor data collection to control algorithm tuning and ROS integration, I built a solid foundation in robotics.

Through building the hardware, collecting sensor data, tuning control algorithms, and integrating with ROS, I gained foundational skills in robotics.
This robot was initially developed as part of an undergraduate capstone design project and later served as a testbed for reinforcement learning research.

After training the policy in a simulator, we transferred it to the real robot (simulation-to-reality) and compared the performance in autonomous navigation.
Through the process of designing reward functions and configuring environments, I gained practical insights into various aspects of autonomous control research.
GitHub: ver1 https://github.com/kMinsAlgorithm/ProjectUSAE
GitHub: ver2https://github.com/kMinsAlgorithm/OmniWheelRobot