Mingyu Kim
k012123600@gmail.com
20-02-2001

Welcome
Thank you for visiting my profile page.
I am a M.S. candidate in Information and Communication Engineering at Myongji University (MJU), advised by Prof. Jaehee Jung .
My master's research focused on enhancing dynamic obstacle avoidance performance in mobile robot navigation by leveraging deep learning models to process semantic information and generate human-like trajectories based on imitation learning.
My primary research interests are focused on:
Learning-based path planning
Imitation learning
Vision–Language–Action model
Robot Development and Implementation
All of these projects were conducted solely by myself.



Research
(* denotes equal contribution)
1. HADP: Hybrid A*-Diffusion Planner for Robust Navigation in Dynamic Obstacle Environments
IEEE Access (2026.9) Impact Factor: 3.6
We proposed the Hybrid A*-Diffusion Planner (HADP) to overcome the generalization and data-efficiency limitations of pure diffusion-based planning in dynamic environments. Our approach uses A* for global path planning in obstacle-free regions and a conditional diffusion model fed by a semantic map, robot pose, and local goal to generate responsive local avoidance trajectories upon detecting dynamic obstacles.
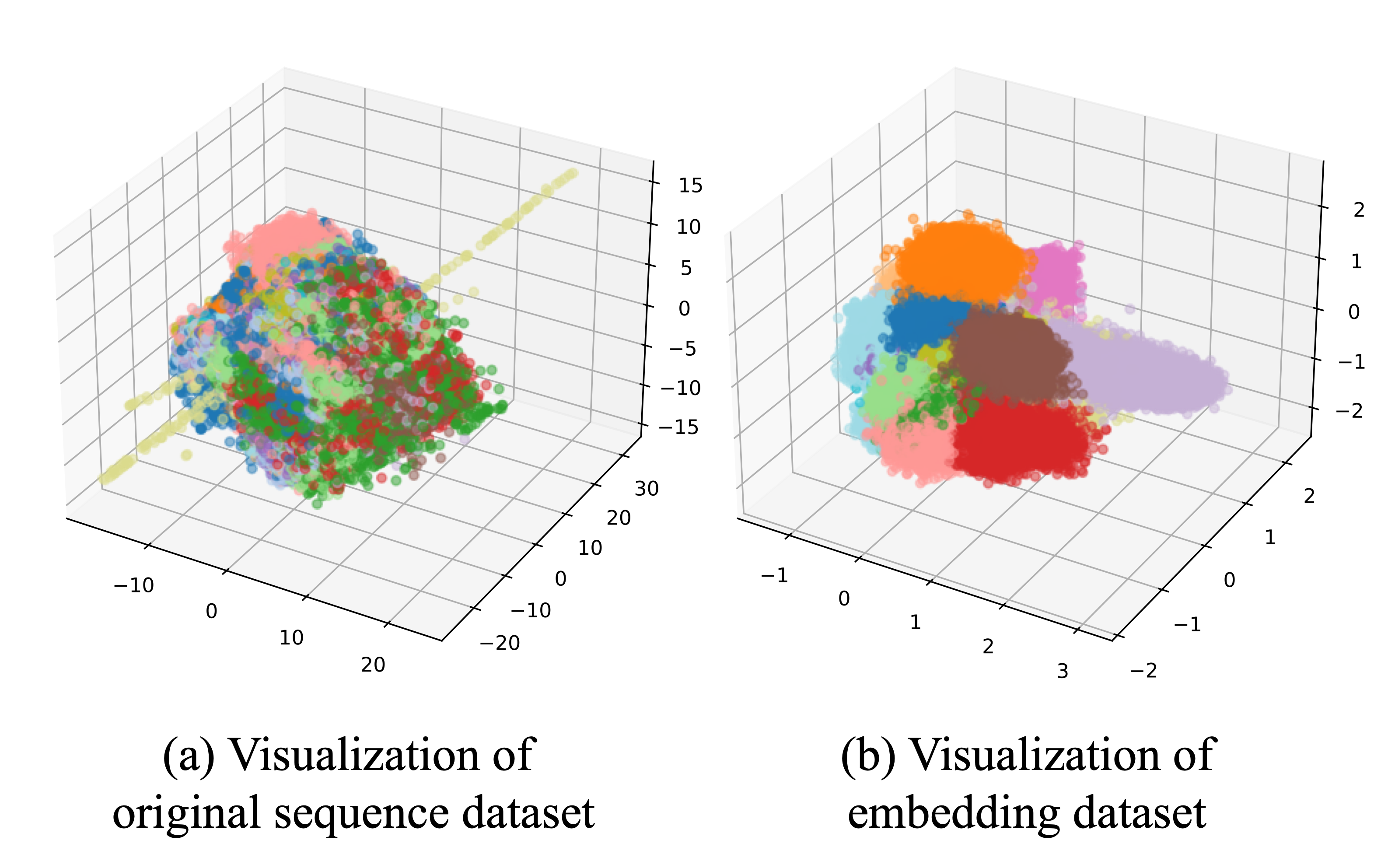
2. HiMSELF: A Hierarchical Misbehavior Classification with Sequence Embedding by Latent Features in Vehicular Ad-Hoc Networks [Link]
IEEE Access (2026.8) Impact Factor: 3.6
We propose HiMSELF, a misbehavior classification system that learns latent sequence embeddings of multi-class BSM data, applies hierarchical clustering to construct a two-stage classification hierarchy, and achieves an average F1-score of 0.9918 on 19 misbehavior classes, outperforming existing models.
Technical Skills
- Python
- C
- Java Script
- Pytorch
- Tensorflow
- NestJS
- ROS
- Gazebo
- Fusion 360